



SOM自己組織マッピングニューラルネットワーク
自己組織化マップ(Self - organizing map, SOM)は、入力空間のデータを学習することで、低次元で離散的なマップ(Map)を生成し、ある意味で次元削減アルゴリズムとも見なせます。
SOMは教師なしの人工ニューラルネットワークです。一般的なニューラルネットワークが損失関数に基づく逆伝播で学習するのと異なり、競合学習(competitive learning)戦略を用いて、ニューロン間の競合により徐々にネットワークを最適化します。また、近傍関数(neighborhood function)を使用して入力空間のトポロジー構造を維持します。
入力空間のトポロジー構造を維持するとは、2次元マップにデータ点間の相対距離が含まれることを意味します。入力空間で隣接するサンプルは、隣接する出力ニューロンにマッピングされます。
教師なし学習に基づいているため、学習段階で人為的な介入(サンプルラベルが不要)が必要なく、クラスを知らない状態でデータをクラスタリングしたり、ある問題に内在する関連特徴を識別したりできます。
特徴のまとめ:
ニューラルネットワーク、競合学習戦略
教師なし学習、追加のラベル不要
高次元データの可視化に非常に適しており、入力空間のトポロジー構造を維持できる
高い汎化能力を持ち、これまでに遭遇したことのない入力サンプルも識別できます
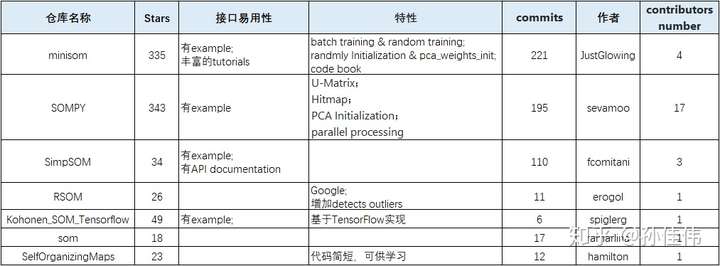
オンライン上には多くのオープンソースの実装があり、ここに私がgithubで収集したリストを示します:
理論だけで話すことで分かりにくくなるのを避けるために、miniSomライブラリの一部の実装を例にして、学習過程のいくつかの式を理解するのを助けます。
ネットワーク構造
SOMのネットワーク構造は2層あります:入力層、出力層(競合層とも呼ばれます)
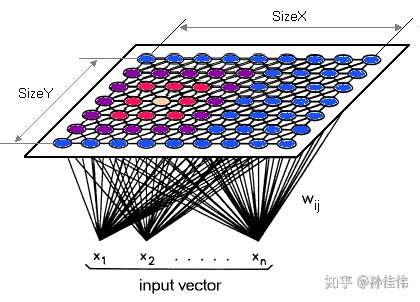
入力層のニューロンの数は入力ベクトルの次元によって決まり、1つのニューロンが1つの特徴に対応します。
SOMネットワーク構造の違いは主に競合層にあります:1次元、2次元(最も一般的)があります。
競合層はより高い次元にすることもできます。ただし、可視化の目的から、高次元の競合層はあまり使われません。
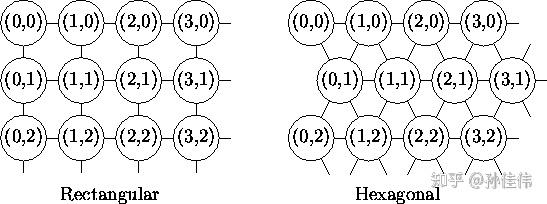
このうち、2次元平面には2種類の平面構造があります:
Rectangular(矩形)
Hexagonal(六角形)
競合層のSOMニューロンの数は、最終モデルの粒度と規模を決定します。これは最終モデルの精度と汎化能力に大きな影響を与えます。
経験則の式:
競合層の最少ノード数 =
N:学習サンプルの数
正方形の出力層の場合、辺の長さは競合層のノード数の平方根を切り上げた値になります。
学習計算過程
第一步:他のニューラルネットワークと同じく、重み(Weighs)を小さな乱数で初期化する必要があります。
第二步:ランダムに1つの入力サンプルXiを選びます。
第三步:
競合層の各ノードを走査し、Xiとノード間の類似度(通常はユークリッド距離を使用)を計算します。
距離が最小のノードを勝者ノード(winner node)として選び、時にはBMU(best matching unit)とも呼ばれます。
第四步:近傍半径σ(sigma)に基づいて勝者近傍に含まれるノードを決定し、近傍関数(neighborhood function)を通じてそれぞれの更新幅を計算します(基本的な考え方は、勝者ノードに近いほど更新幅が大きく、遠いほど更新幅が小さくなります)。
第五步:勝者近傍内のノードの重み(Weight)を更新します:
W_v(s + 1) = W_v(s) + θ(u, v, s) · α(s) · (D(t) - W_v(s))
θ(u, v, s)は更新の制約で、BMUからの距離に基づいた近傍関数の返り値です。
W_v(s)はノードvの現在の重みです。
第六步:1回の反復を完了し(反復回数 + 1)、第二步に戻り、設定された反復回数に達するまで繰り返します。
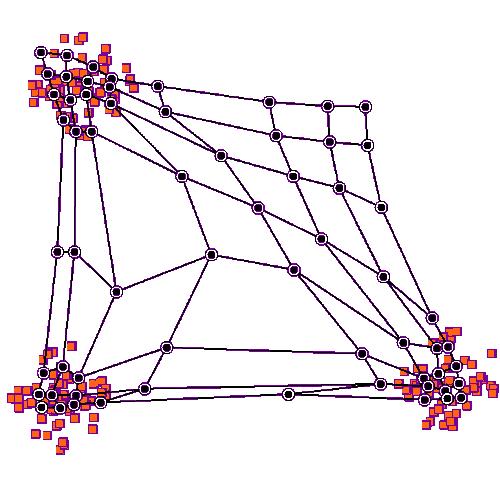
gifで示される学習過程のように、勝者ノードは更新後、入力サンプルXiの空間内の位置に近づきます。勝者ノードのトポロジー上の近傍ノードも同様に更新されます。これがSOMネットワークの競合調整戦略です。
近傍関数(neighborhood function)
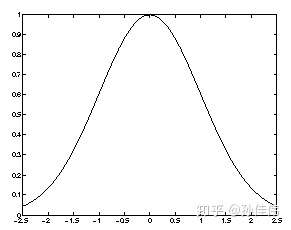
近傍関数は、勝者ノードが近傍ノードに与える影響の強さ、つまり勝者近傍内の各ノードの更新幅を決定するために使用されます。最も一般的な選択はガウス関数で、勝者近傍内での影響の強さと距離の関係を表すことができます。
g = neighborhood_func(winner, sigma) w_new = learning_rate * g * (x - w)
winnerは勝者ノードの出力平面上の座標です。
sigmaは近傍範囲を決定し、sigmaが大きいほど近傍範囲が広くなります。
sigmaの取りうる値の範囲:
sigmaは0より大きくなければならず、そうでないとニューロンが更新されません。
また、sigmaは2次元出力平面の辺の長さより大きくすることはできません。
ガウス関数には指数項が含まれるため、計算量が非常に大きくなります。bubble関数を使ってガウス関数をよく近似することができます。bubble関数は勝者ノードの近傍範囲内では定数であるため、近傍内のすべてのニューロンの更新幅は同じになります。sigmaによってのみ、どれだけのニューロンが更新に関与するかが決まります。
bubble関数は、計算コストとガウスカーネルの精度のバランスをうまく取ることができます。
勝者近傍内のノードの更新程度の可視化:
5X5の競合層を例にとり、中心ノードが勝者ノードであると仮定します。
from numpy import outer, logical_and size = 5 neigx = arange(size) neigy = arange(size)
ガウス近傍関数:
ガウス関数は連続的であるため、sigmaの有効な取りうる値の範囲も連続的です。
def gaussian(c, sigma): """Returns a Gaussian centered in c.""" d = 2*pi*sigma*sigma ax = exp(-power(neigx - c[0], 2)/d) ay = exp(-power(neigy - c[1], 2)/d) return outer(ax, ay) # the external product gives a matrix out = gaussian((2,2),1)
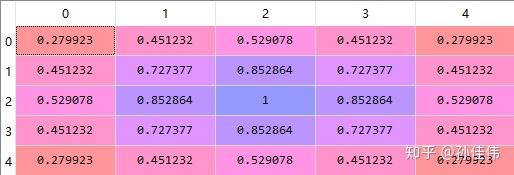 sigma = 1
sigma = 1
sigmaを1に設定すると、すべてのノードに一定の更新幅があり、中心の勝者ノードは1で、勝者ノードから遠ざかるほど更新幅が低くなります。
sigmaは実際にはこの距離による減衰の程度を制御しています。
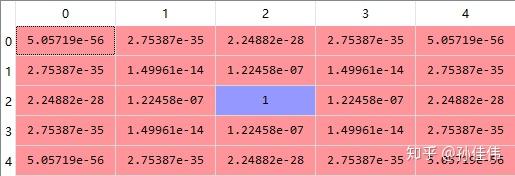 sigma = 0.1
sigma = 0.1
sigmaの値が非常に小さい場合、勝者ノードの更新幅のみが1で、他のノードはほとんど0に近くなります。
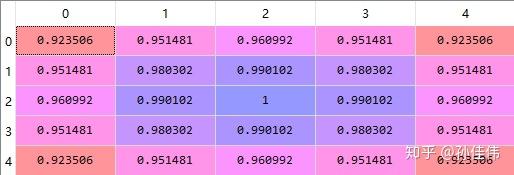 sigma = 4
sigma = 4
sigmaの値が大きい場合、減衰の程度は遅く、端のノードでも比較的大きな更新幅があります。
Bubble近傍関数:
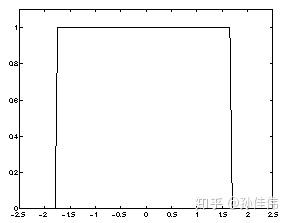
Bubble関数:勝者近傍内のニューロンは、更新係数がすべて同じです。
(X > winner_x - sigma) & (X < winner_x + sigma)
したがって、 sigmaの有効な取りうる値は離散的です:
0.5:勝者ノードのみ
1.5:周囲1周
2.5:周囲2周
(1,2] の間の値はすべて同じ効果で、周囲1周になります。
def bubble( c, sigma): "

41
 item of content
item of content
- 2201hits
- 0replay
-
4like
- collect
- send report